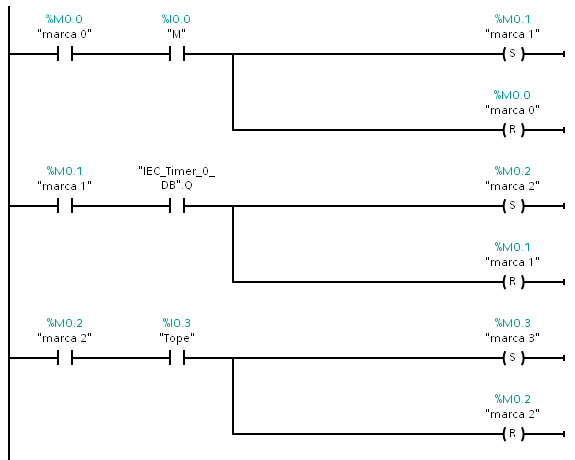
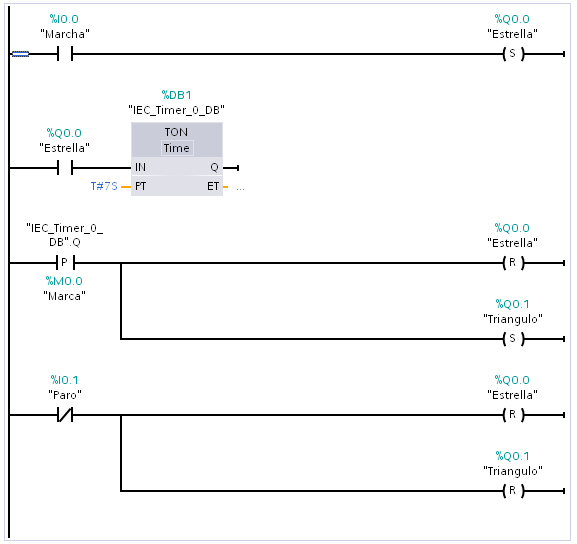
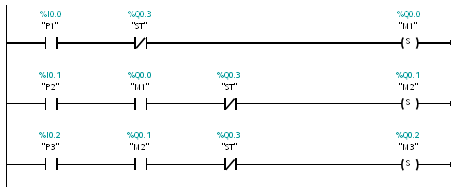
Diseñar el programa de control en lenguaje diagrama de contactos de un semáforo.
Dicho semáforo dispone de un pulsador de puesta en marcha.
En el estado normal, el semáforo de vehículos está en verde y el de peatones en rojo.
Una vez pulsado el botón, la secuencia de funcionamiento debe ser la siguiente:
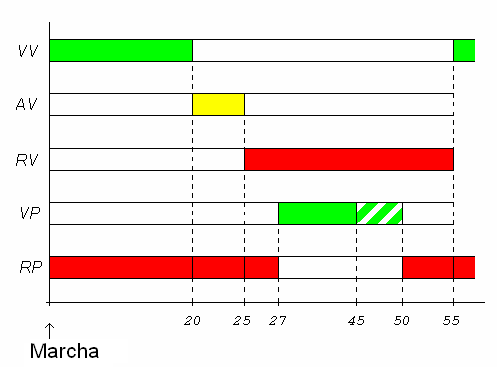
1. La luz verde del semáforo de los vehículos estará activa durante 20 segundos.
2. La luz ámbar se encenderá durante 5 segundos inmediatamente después de que
se apague la luz verde.
3. La luz roja del semáforo de los vehículos se enciende durante 30 segundos.
4. La luz roja del semáforo de los peatones estará encendida 7 segundos más que la
verde de los vehículos.
5. Una vez que se apaga la luz roja de los peatones, se enciende la luz verde de
forma continua durante 18 segundos, para después parpadear con una frecuencia
de 1 segundo durante 5 segundos.
Cronograma:
Antes de comenzar a realizar el programa, conviene dibujar un cronograma para ver con
mayor claridad el tiempo que debe estar encendida cada una de las luces del semáforo.
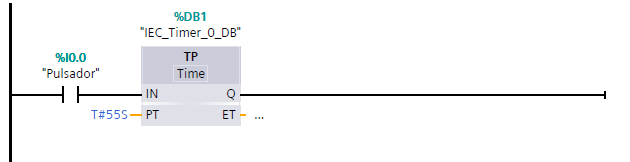
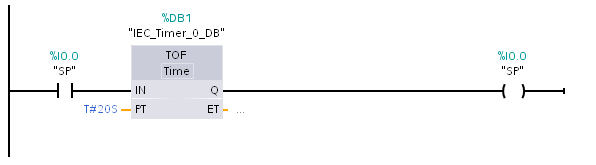
Temporización general. Comienza al pulsar el peatón.
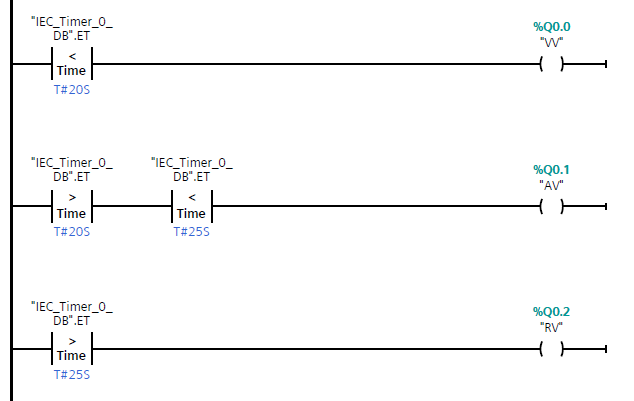
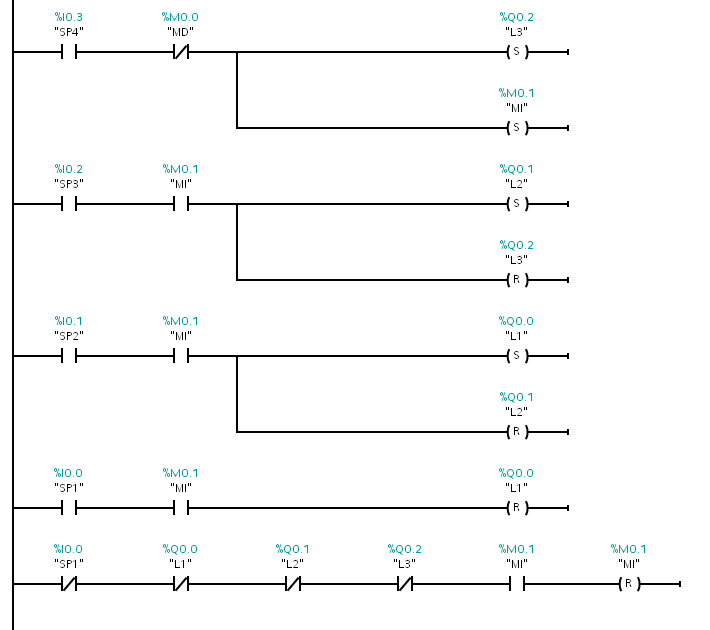
Luces para los vehículos.
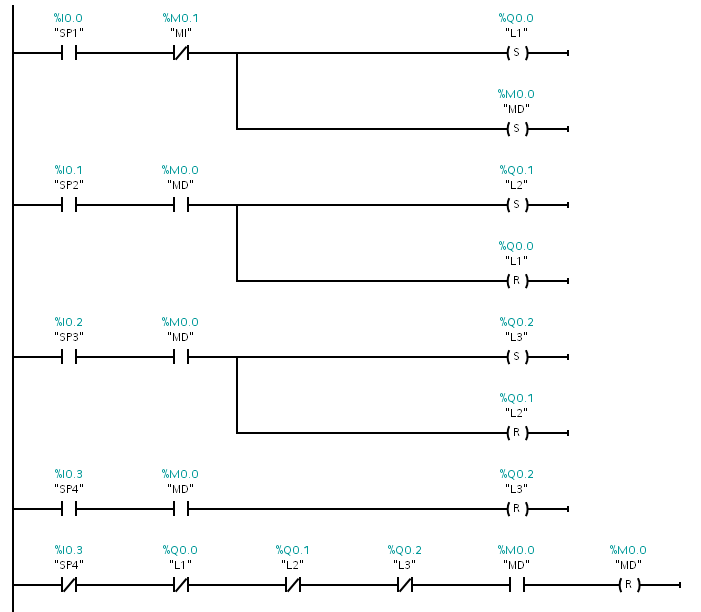
Luces para peatones.
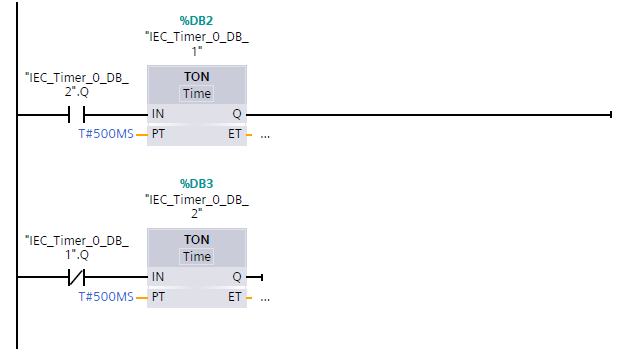
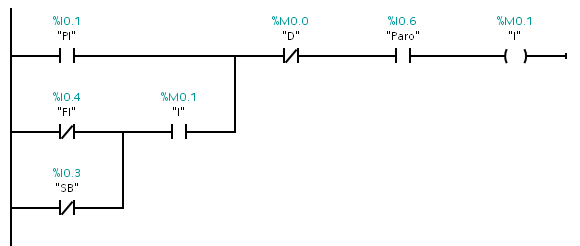
Control de la intermitencia.
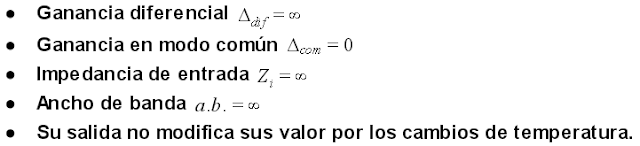 En la mayor parte de los casos se puede considerar las características de un A.O. ideal y por tanto se simplifican mucho los cálculos.
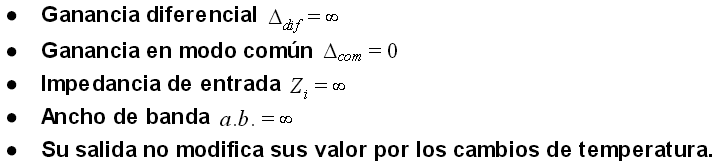
En la mayor parte de los casos se puede considerar las características de un A.O. ideal y por tanto se simplifican mucho los cálculos.
 En la mayor parte de los casos se puede considerar las características de un A.O. ideal y por tanto se simplifican mucho los cálculos.
En la mayor parte de los casos se puede considerar las características de un A.O. ideal y por tanto se simplifican mucho los cálculos.